Động cơ servo có nhiều kiểu dáng và kích thước, được sử dụng trong nhiếu máy khác nhau, từ máy tiện điều khiển bằng máy tính cho đến các mô hình máy bay và xe hơi. Ứng dụng mới nhất của động cơ servo là trong các robot, mô hình máy bay và xe hơi. Ta có thể điều khiển động cơ servo bằng máy tính, bộ vi xử lý hay thậm chí một mạch điện tử đơn giản dùng IC 555.
[toc]
Có bao nhiêu loại động cơ Servo?
Có nhiều cách phân loại động cơ Servo khác nhau, nếu phân loại điện áp điều khiển ta có 2 loại là động cơ: Servo DC (loại 1 chiều), Servo AC. Và trong dòng động cơ Servo DC cũng có thể chia ra làm 2 loại là loại động cơ có chổi than và loại không có chổi than.
Lựa chọn động cơ Servo như thế nào?
Khi lưa chọn động cơ cần phải xem sét nhiều yếu tố và các đặc trưng về dải tốc độ, sự biến đổi momen tốc độ, tính thuận nghịch, chu kì làm việc, momen khởi động và công suất yêu cầu.
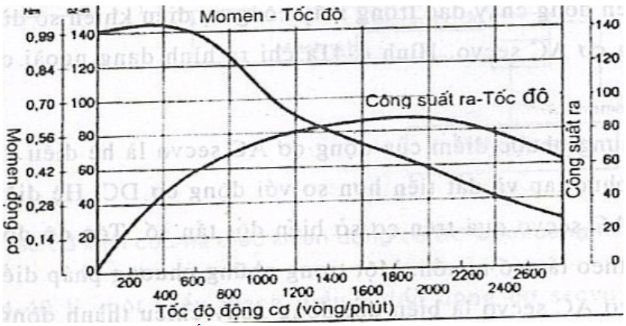
Đặc biệt lưu ý tới đường cong momen tốc độ động cơ bởi vì các đường cong này cho ta những thông tin quan trọng. Đường cong này chỉ ra sự liên quan giữa tốc độ – moomen – điện áp. Để lựa chọn lựa công suất cần chọn lưạ các vấn đề sau:
Momen khởi động động cơ
Momen ở tốc độ quay bằng 0 được gọi là momen khởi động động cơ. Để động cơ tự khởi động được, động cơ phải sinh ra momen lớn hơn momen ma sát và momen tải đặt lên trục của nó.
Tốc độ cực đại của động cơ
Nhìn vào đồ thị quan hệ momen tốc độ, tại điểm momen bằng 0 xác định tốc độ cực đại của động cơ. Cần phải nhớ rằng tại tốc độ này động cơ không qua momen và tốc độ này gọi là tốc độ không tải.
Công suất yêu cầu tải
Công suất yêu cầu đặc biệt quan trọng đối với động cơ, vì vậy người thiết kế phải lựa chọn động cơ có công suất tương ứng với công suất yêu cầu trong chu kỳ làm việc.
Nếu hệ dẫn động yêu cầu điều chỉnh tốc độ
Tốt nhất là lựa chọn động cơ đồng bộ hoặc động cơ một chiều. Hoai loại này có thể điều khiển đảo chiều đơn giản và đặc tính cơ rất cứng.
Nếu hệ yêu cầu điều khiển cả vị trí và tốc độ
Trong trường hợp vị trí góc thực hiện theo vị trí rời rạc hoặc gia số, tốt nhất là động cơ bước.
Động cơ bước có thể điều khiển tốc độ bằng cách thay đồi tần số cấp xung và chỉ dùng trong các mạch điều khiển nhỏ, yêu cầu không cao (vì mạch điều khiển động cơ bước là mạch điều khiển hở).
Động cơ bước chỉ dùng trong trường hợp tải trọng nhỏ và không thể dùng trong trường hợp đòi hỏi tốc độ quá cao, hoặc tải trọng thay đổi biên độ lớn và liên tục.
Trong trường hợp yêu cầu điều khiển cả vị trí và tốc độ, như trong các thiết bị chuyển động theo chương trình số ta thường sử dụng động cơ Servo.
Động cơ Servo là động cơ AC, DC hoặc động cơ một chiều không có chổi than có mạch phản hồi kép kín vị trí – tốc độ….
Hệ thống cần hay không cần giảm tốc: Thông thường tải được điều khiển ở dải tốc độ thấp và momen lớn. Đặc tính của động cơ ở tốc độ cao momen thấp vì vậy cần hộp giảm tốc độ đầu ra. Khi dùng hộp tốc độ quán tính tải cũng thay đổi theo.
Động cơ servo RC
Mặc dù còn có nhiều loại động cơ servo khác nhau nhưng động cơ servo R/C được sử dụng nhiều nhất. Chúng ta sẽ tìm hiểu động cơ servo R/C là gì, sử dụng chúng như thế nào.
Động cơ servo RC là gì?
Động cơ servo RC là dạng động cơ điện đặc biệt, động cơ này chỉ quay khi được điều khiển (bằng xung) với góc quay chính xác nằm trong khoảng từ 0 độ – 180 độ. Như vậy ta có thể thấy loại động cơ Servo RC được được thiết kế để quay có giới hạn chứ không phải quay liên tục như động cơ DC hay động cơ bước…
Ứng dụng động cơ Servo RC
Với động cơ servo RC khi hoạt động có khả năng điều khiển chính xác vị trí trong khoảng góc quay giới hạn đó nên được ứng dụng nhiều trong: điều khiển để lái robot, di chuyển các tay máy lên xuống, quay một cảm biến quét xung quanh, làm cánh tay sinh học, các cơ cấu gạt – xoay…
Điều khiển động cơ Servo RC
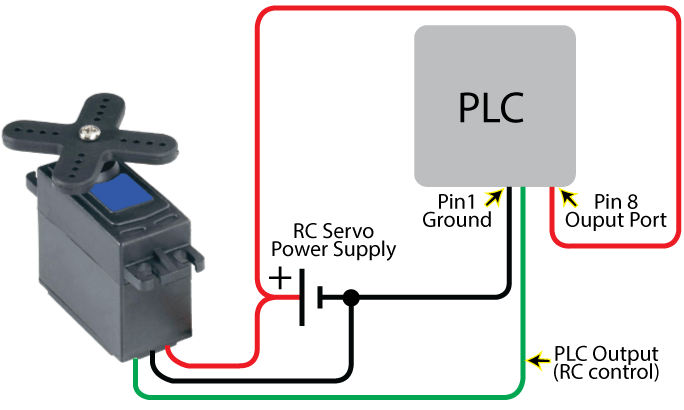
Với một động cơ Servo RC bình thường sẽ có 3 dây ra gồm: GND (âm – dây mát – đất), VCC (dây nguồn dương), và SIGNAL (tín hiệu). Để động cơ hoạt động ta sẽ nối dây như hình dưới. Muốn động cơ quay ta phải cấp xung vào chân SIGNAL của động cơ ở dạng xung.
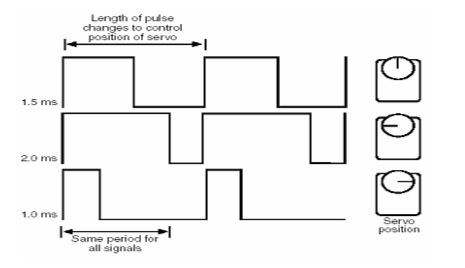
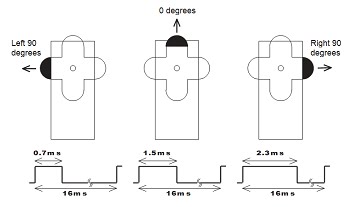
Từ hình vẽ “xung điều khiển” ta có thể thấy xung điều khiển của động cơ có đặc điểm sau: Chu kỳ (length of plulse changes to control position of servo), Độ rộng xung (có thể thay đổi, trong hình là 0.7ms, 1.5ms, 2.3ms). Trong đó:
- Chu kỳ (Time Period – thời gian xuất hiện 1 xung) dùng để điều khiển chiều quay. Ví dụ với độ dài xung 1 ms, servo được điều khiển quay theo một chiều (giả sử là chiều kim đồng hồ). Với độ dài xung xung 2 ms, servo quay theo chiều ngược lại. Kỹ thuật này còn được gọi là tỉ lệ số – chuyển động của servo tỉ lệ với tín hiệu số điều khiển.
- Độ rộng của xung (Duty Cycle – thời gian xung dương xuất hiện trong 1 chu kỳ) dùng điều khiển góc quay động cơ, hay nói cách khác Góc quay của trục ra động cơ chính là độ rộng của tín hiệu xung cấp vào chân signal.
Một điểm lưu ý khi điều khiển: Các xung này được gởi đi 50 lần/giây tới chân Signal. Tùy theo mà mỗi động cơ Servo RC đòi hỏi khoảng 30 – 60 xung/giây. Nếu số này quá thấp, độ chính xác và công suất để duy trì servo sẽ giảm.
Như đã trình bày ở trên, muốn điều khiển bạn chỉ cần tạo ra một chuỗi xung chuẩn theo quy luật (tần số, độ rộng). Để tạo ra xung đơn giản nhất là việc ứng dụng IC 555. Đây là một IC định thời phổ biến, có rất nhiều ứng dụng thực tế.
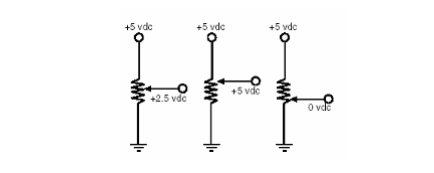
Với sơ đồ mạch đơn giản phía trên bạn chỉ cần sử dụng 1 ic định thời 555 cùng các linh kiện khác và trong đó có một biến trở để chỉnh góc và chiều quay của động cơ servo.

Ngoài IC 555 các bạn còn có rất nhiều phương án khác, và cách hay dùng nhất là sử dụng các bộ Vi xử lý/Vi điều khiển làm bộ điều khiển. Ví dụ dưới đây cho ta thấy một chương trình điều khiển đơn giản sử dụng Arduino (vi điều khiển AVR).
- #include <Servo.h>
- #define SERVO_PIN 9
- Servo gServo;
- void setup()
- { gServo.attach(SERVO_PIN);}
- void loop()
- {
- gServo.write(0);
- delay(1000);
- gServo.write(90);
- delay(1000);
- gServo.write(180);
- delay(1000);
- }
Ý nghĩa:
- Dòng 1: Khai báo sử dụng thư viện servo
- Dòng 2: Sử dụng PIN 9 để điều khiển servo, vì vậy hằng số với tên gọi SERVO_PIN có giá trị là 9
- Dòng 3: khai báo đối tượng gServo, và servo sẽ được điều khiển qua đối tượng này
- Dòng 6: Servo điều khiển động cơ ở SERVO_PIN.
- Dòng 10, 12, 14: điều chỉnh góc xoay của servo.
[su_youtube_advanced url=”https://youtu.be/zOzsRVz6XBM” controls=”no”]
Động cơ Servo RC có sử dụng được lâu dài?
Nhưng với những loại giá rẻ chỉ sử dụng được trong thời gian ngắn, sau một thời gian hoạt động điều khiển sẽ kém chính xác, hoặc không ổn định. Với những loại động cơ được chế tạo cẩn thận, dùng các loại vật liệu tốt thì thời gian sử dụng được tương đối lâu.
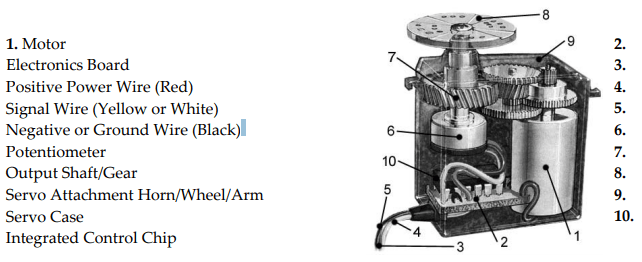
Nguyên nhân của việc này bắt nguồn từ cơ cấu phản hồi của động cơ servo RC là dạng triết áp (chi tiết số 6 trong hình Cấu tạo động cơ Servo RC phía trên), sau một thời gian hoạt động tiếp xúc cơ khí trong triết áp bị mòn, dẫn đến tín hiệu phản hồi bị sai lệch. Để khắc phục người ta phản hồi bằng encoder.
Bảng tra mã động cơ Servo RC phổ biến
* Xem thông số kỹ thuật chi tiết dưới bảng này
[ninja_tables id=”73654″]
Thông số kỹ thuật
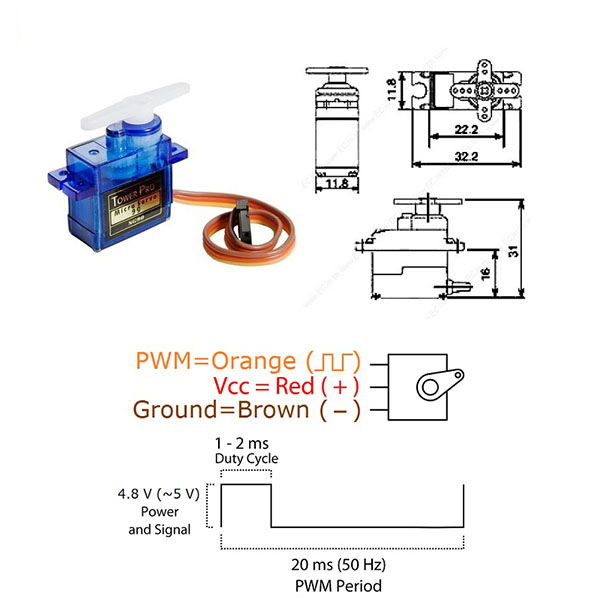
SG90
SG90 là mẫu động cơ servo cỡ nhỏ khoảng 9gam, ở mức lớn nhất động cơ có thể tạo ra mômen xoắn 1.8Kg/cm, và hoạt động trong một giải điện áp rộng từ 3.0 – 7.2V. SG90 là mẫu động cơ nhiều trong các loại máy bay RC như: Hitec, Futaba, GWS, JR hoặc nhiều bạn sinh viên sử dụng trong điều khiển các cơ cấu nhẹ.
Thông số
- Momen xoắn: 1.8kg/cm
- Tốc độ hoạt động: 60 độ trong 0.1 giây
- Điện áp hoạt động: 4.8V(~5V)
- Nhiệt độ hoạt động: 0ºC – 55ºC
- Khối lượng: 9g
- Kích thước: 22.2×11.8.32(mm)
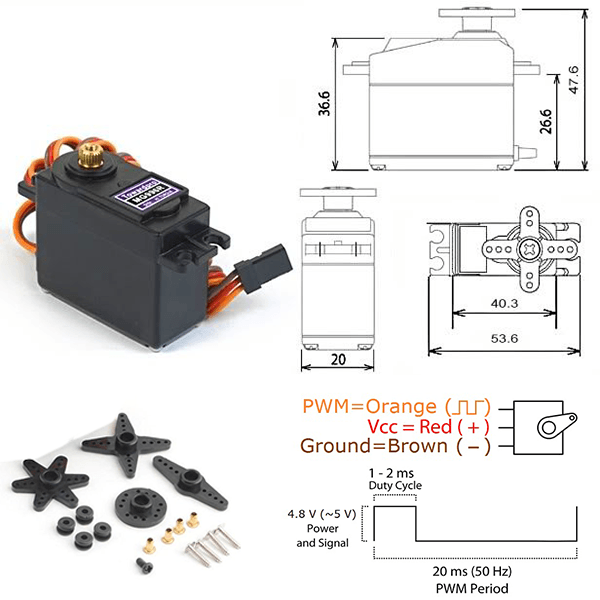
MG996R 6V/1Kg
Động cơ SERVO 996R là một mẫu động cơ kích thước nhỏ, có mômen xoắn lớn được nâng cấp từ phiên bản tiềm nhiệm MG995 6V/11Kg. Để truyền lực các bánh răng giảm tốc của động cơ được chế tạo từ kim loại đồng.
SERVO 996R được ứng dụng nhiều, như: làm cánh tay robot, cơ cấu gạt – nâng – hạ, bẻ lái xe – máy bay – tàu… mượt mà nhờ tích hợp sẵn Driver điều khiển bên trong theo cơ chế phát xung – quay góc nên dễ sử dụng.
Thông số kỹ thuật:
- Mômen xoắn: 9.4kg / cm (4.8V), 11kg / cm (6V)
- Tốc độ phản ứng: 0.17sec / 60 (4.8V); 0.14sec / 60 (6V)
- Điện áp hoạt động: 4.8 – 7.2V
- Nhiệt độ làm việc: 0℃ – 55℃
- Kích thước sản phẩm: 40.7×19.7 x 42.9mm
- Trọng lượng: 55g
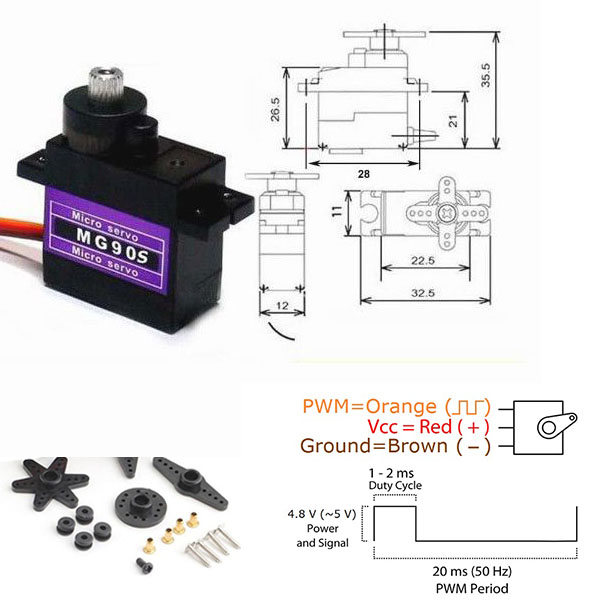
MG90S
Có thể nói MG90S là phiên bản nâng cấp của mẫu SG90, bằng việc tăng công suất động cơ và hệ thống bánh răng nhựa thay bằng bánh răng kim loại nên môn men xoắn cho ra lớn hơn, thân hình động cơ chắc chắn hơn, tuy nhiên trọng lượng tăng lên không đáng kể, trong khi kích thước gần giữ nguyên.
Thông số kỹ thuật:
- Điện áp hoạt động: 4.8V – 6VDC
- Mô men xoắn: 1.8kg/cm (4.8V) 2.2kg/cm (6.0v)
- Phản ứng tốc độ: 0.10sec / 60degree (4.8V) 0.08sec / 60degree (6.0v)
- Nhiệt độ: 0-55 độ
- Trọng lượng sản phẩm: 13.4g
- Kích thước: 22.8×12.2×28.5mm
FUTABA S3003
FUTABA S3003 là mẫu động cơ nhỏ, lực kéo vừa phải (lớn hơn mẫu SG90, MG90S) bởi các bánh xe được làm bằng nhựa hoàn toàn nhằm thay thế cho các mẫu Futaba S138, S148, S22, S38 và S12 đã tồn tại trước đó. Động cơ S3003 phù hợp với các ứng dụng đơn giản yêu cầu lực không quá lớn.

Thông số kỹ thuật
- Điện áp hoạt động: 4.8 ~ 6.0V
- Tốc độ hoạt động: (4.8V); 0.23s / 60° khi không tải; (6.0V); 0.19s / 60° khi không tải
- Mô men: (4.8V): 3.2kg.cm; (6.0V): 4.1kg.cm
- Dòng điện tiêu thụ (4.8V): 7.2mA khi đứng yên; (6.0V): 7.2mA khi đứng yên.
- Chu kì: 30 ms
- Phạm vi quay: 60°
- Kích thước: 41x20x36mm
- Khối lượng: 38g.
PDI-6221MG
Nổi bật với bộ bánh răng làm bằng kim loại, mẫu động cơ PDI-6221MG là ứng cử viên sáng giá cho các yêu cầu chuyển động chính xác và cần lực kéo khỏe như cơ cấu nâng hạ, cánh tay robot… vì ở 6V động cơ cung cấp mô men xoắn lên tới 20kg/cm và gần gấp đôi mẫu MG996R. Khi bán nó còn kèm theo rất nhiều phụ kiện đáp ứng đủ nhu cầu sử dụng thực tế.

Hiện mẫu PDI-6221MG có khá nhiều phiên bản như: PDI-6221MG-360, PDI-6221MG-300, PDI-6221MG-180, PDI-6221MG, 4409MG.
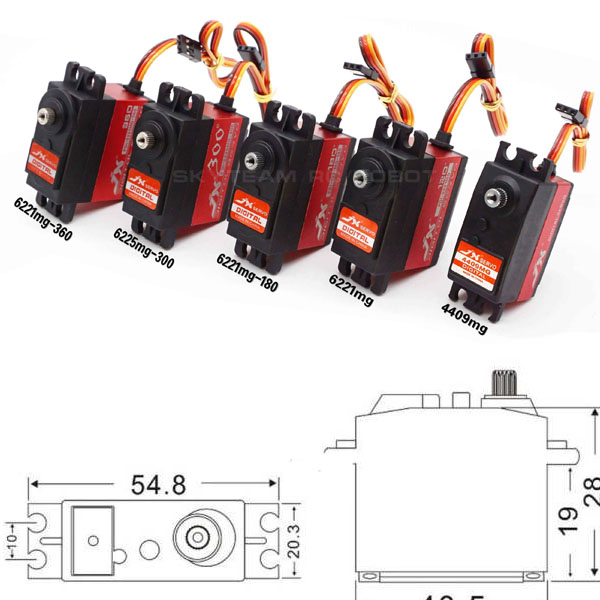
Thông số kỹ thuật
- Tốc độ: 0.18 sec/60° (4.8V) và 0.16 sec/60° (6.6V)
- Mô men xoắn: 17.25 kg.cm (4.8V) và 20.32 kg.cm (6.6V)
- Kích thước: 40.5×20.2x38mm
- Trọng lượng: 62g
- Chiều dài dây: 265mm
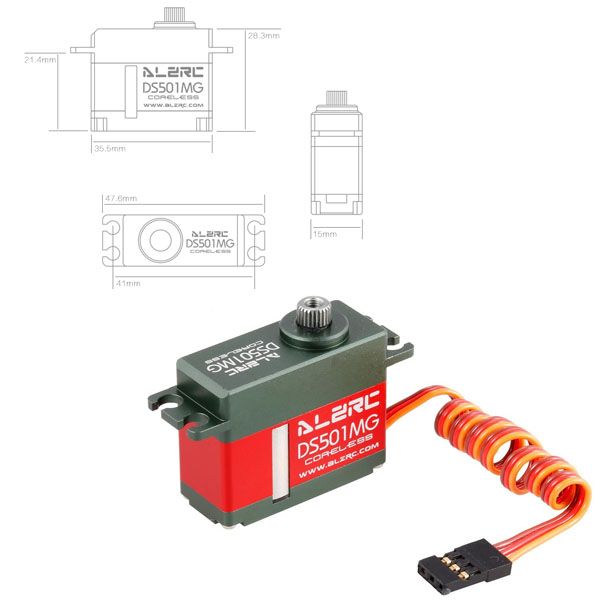
DS501MG
Nếu chỉ nhìn vào giá bán và mô men xoắn thì bạn sẽ đánh giá đây là một động cơ servo hạng xoàng mà giá bán cao, nhưng giá cao cũng có cái lý của nó. Bởi đây là mẫu động cơ servo cỡ nhỏ có tốc độ đáp ứng cao hơn hầu hết các động cơ còn lại (1520μs/333Hz), tiêu biểu như các máy bay hay máy khắc cắt… Bên cạnh đó động cơ này cũng được chế tạo vỏ bằng nhôm, các linh kiện bên trong làm từ các loại vật liệu cao cấp, áp dụng nhiều kỹ thuật cao nên động cơ hoạt động chính xác và rất bền.
Thông số kỹ thuật
- Tần số làm việc: 1520μs/333Hz
- Động cơ: Động Cơ Coreless
- Điện Áp hoạt động: DC6.0V-8.4V
- Tốc độ vận hành (6 V): 0.07sec/60 °
- Tốc độ vận hành (7.4 V): 0.06sec/60 °
- Tốc độ vận hành (8.4 V): 0.05sec/60 °
- Gian hàng mô-men xoắn (6 V): 4.6kg.cm
- Stall torque (7.4 V): 5.5kg.cm
- Stall torque (8.4 V): 6.5kg.cm
- Kích thước: 35.5*28.3*15mm
- Trọng lượng: 35g
V120D02S 130X
Dây mẫu động cơ servo nhỏ nhất, nó chỉ nặng 3.7g. Tuy nhiên sức mạnh mà nó tạo ra không hề nhỏ chút nào, nhờ hệ thống bánh răng bằng kim loại hoạt động có độ chính xác cao. Vì vậy nó phù hợp dùng trong các kết cấu yêu cầu giảm tối đa hóa trọng lượng như các mô hình máy bay trực thăng.

Thông số kỹ thuật
- Mô men xoắn: 0.30kg/cm (5.0V)
- Tôc độ đáp ứng: 0.09 sec/60° (5.0V)
- Kích thước: 20×8.30×16.40mm
- Trong lượng: 3.7g
- Dòng Idle: 30mA (5.0V)
- Dòng hoạt độngl: 250mA (5.0V)
- Điện áp hoạt động: 5.0V DC
D0576HT-HV
Như đã trình bày ở trên, sau một số lần hoạt động nhất định các động cơ Servo RC lẽ gặp lỗi điều khiển vị trí thiếu chính xác, một nguyên nhân lớn xuất phát từ việc tiếp xúc cơ khí trong bộ phận phản thồi (triết áp) của động cơ bị mòn gây ra sai số. Tuy nhiên, D0576HT-HV là trường hợp ngoại lệ, vì tiếp xúc cơ khi của nó là loại siêu tốt, theo công bố của hãng có có thể đạt tới 100.000 chuyển động. Ngoài tính năng trên thì nó cũng nằm trong top các động cơ servo có tốc độ phản hồi siêu nhanh (1520us/333Hz 900-2100us) và tiềm ẩn sức mạnh (mô mon xoắn 3.00kg.cm@6.0V 4.2kg.cm@7.4V).

Thông số kỹ thuật
- Tần số điều khiển: 1520us/333Hz 900-2100us
- Mô men xoắn: 3.00kg.cm@6.0V 4.2kg.cm@7.4V
- Tốc độ phản hồi: 0.069sec/60°@6.0V 0.056sec/60°@7.4V
- Kích thước: 20.40*8.70*25.00mm(L*W*H)
- Trong lượng: 7.9g
- Điện áp hoạt động: DC4.5V-7.4V
Lời kết: Làm thế nào để mua được động cơ servo chuẩn?
Như các bạn đã biết hiện nay có khá nhiều động cở RC làm nhái, hoặc loại đã qua sử dụng, nếu không cẩn thận các bạn rất dễ mua phải. Dưới đây là vài lưu ý khi mua động cơ servo RC chuẩn.
Đầy đủ phụ kiện: Thông thường mỗi động cơ sẽ kèm theo một bộ đầy đủ phụ kiện, như: tròn, sao, chữ thập, 4 cánh).
Kích thước chuẩn như công bố và nặng: Nếu có thể, bạn nên kiểm tra lại kích thước động cơ phải giống như datasheet công bố, khi cầm động cơ lên tay bạn sẽ thấy đầm chắc, vì các chi tiết làm dày dặn chắc chắn.
Quay thử – kiểm tra dây dẫn: dây dẫn loại tốt thường dày dặn hơn, lõi to hơn, màu sắc dây đậm – sắc nét, uốn thử thấy cứng hơn dây loại xấu. Khi lấy tay quay cảm giác động cơ có sức ỳ lớn hơn do nam châm động cơ tốt có từ trường mạnh.